|
Using Telescience to Share NASA Resources During the Classroom
Study of a Mars Sample and Return Mission
Richard Hooper and SV Sreenivasan
Department of Mechanical Engineering
The University of Texas
Austin, Texas 78712 |
Donald A Morrison
Earth Science and Solar System Exploration Division
NASA/Johnson Space Center
Houston, Texas 77058 |
Proceedings of the ASEE Gulf-Southwest Annual Conference, The University of Houston, March 23-25, 1997 |
|
Abstract
Exposure to "real-world" engineering applications excites and motivates students by giving them a context in which to interpret their academic work. Industry and government agencies are ideal sources of applications for case study. The requirements these applications generate lend realism to academic studies. Unfortunately, industry and government are seldom collocated with the engineering classroom. This paper describes the use of telescience (sharing scientific resources using long-distance communications technology) to bring remotely-located equipment and expertise into the classroom during the study of a Mars sample-and-return application. The Mars sample-and-return mission requirements serve as a motivation for studying robot dynamics (robots will likely gather the samples). This sort of study naturally requires classroom and homework time. Thus, the paper also looks at the relationship between "exciting" applications study and more traditional lecture, homework, and examinations. Finally, the paper classifies these pursuits according to the role they play as educational
tools.
Introduction
This work began with the collaboration of planetary geologists at the NASA-Johnson Space Center (JSC) and robotics engineers at the University of Texas (UT). By working together, JSC gains access to state of-the-art robotics technology and UT gains access to valuable mission requirements. Due to mutual interest, the collaboration also became to involve a continuing educational initiative in which JSC scientists participate in lectures, projects, and experiments. The two-hundred miles from JSC to UT makes telescience and telecommunications methods attractive for these interactions whenever possible. Intuitively it seems that these sort of interactions with scientists and engineers from government and industry will excite and motivate the students. Realistically, these interactions also take time away from more traditional methods of educating engineering students. To better understand theses trade-offs, this paper looks at how course components developed during the collaboration relate to traditional lecture, homework, and examinations. Kolb's learning style model forms the basis for the comparison
[1].
Though the relationship may seem unusual, there is a sound basis for collaboration between robotics engineers and planetary geologists - particularly with regards to the Mars sample-and-return mission. This is because current mission scenarios envision using robotic mobile platforms and manipulators to gather geological samples. The geologists need to understand the capabilities and limitations of these robots when choosing the variety and location of target samples. The robotics engineers need to understand the mechanical characteristics of the samples and the techniques, such as drill and core, for gathering samples. NASA is interested in gathering samples because they want to study the Martian rocks. Robotics is an enabling technology. Though this paper focuses on course components developed to address the Mars sample-and-return application, with only slight modifications the components would fit equally well with many other applications found in government and
industry.
Educational
Initiative
The current focus of the educational initiative is an Advanced Dynamics of Robotic Systems course. This course teaches the methodology for describing a robot's motions and the forces that cause them. The topics include rigid-body kinematics, rigid-body dynamics, and multi-loop parallel chains. Because robotic systems will typically have six degrees of freedom or more, the notation for the analysis becomes quite complex. The course spends roughly one-half of the semester covering notation and kinematics before the students have the tools they need to begin dynamics. This semester the course is incorporating the Mars sample-and-return mission in the hopes of encouraging and motivating the students as they study this sometimes-dry subject.
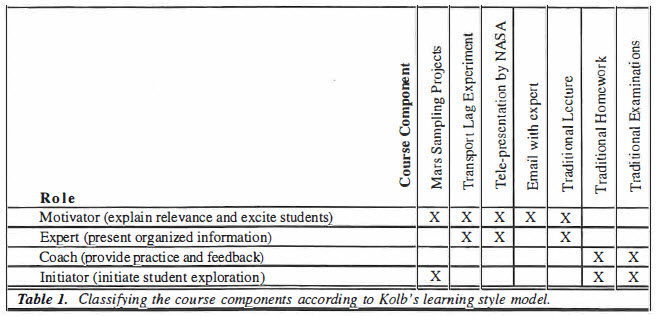
The first four course components listed in Table 1. focus on the Mars sample-and-return mission. These types of components are all well-suited to situations where equipment and expertise are located many
miles from the teaching campus. Semester-long design projects form the first Mars sample-and-return component. In these projects the students divide into small (2-4) teams and design a solution to one of four mission requirements. Briefly, these requirements are: acquire and stow, trench and sieve, drill and core, and clean solar cells. Each of the projects requires a dynamic analysis of all forces and torques involved in the operations. The next course component is a transport lag experiment. Transport lag has a deleterious effect on control of dynamic systems and is a pervasive problem in the long-distance control typical of NASA operations.
The transport lag experiment integrates a traditional lecture with a hands-on demonstration of principles in a single one-hour class. The third component is a tele-presentation by one of the NASA geologists. This telepresentation will cover solar system geology and its study. The presentation should be quite interesting as the JSC planetary geologists are the curators of the lunar rocks as well as the Martian meteorite recently said to contain artifacts of life [2]. The final component is entitled simply "email with an expert." The primary purpose of this component is to provide the students with a low-cost and comfortable medium for asking questions and interacting with the NASA
personnel.
 |
|
|
The table above lists seven components for this semester's Advanced Dynamics of Robotic Systems course. The role each component plays in teaching the students determines its classification as either motivator, expert, coach, or initiator. As the basis for this classification Kolb's model groups students according to their preference for perceiving and internalizing information. Kolb describes two ways of perceiving information: either by concrete experience or abstract conceptualization. Similarly he describes two ways of internalizing the information: either by active experimentation or reflective observation. The permutations of these preferences generate four learning modes: (1) concrete, reflective; (2) abstract, reflective; (3) abstract, active; and (4) concrete, active. To excite all four learning modes a course should function respectively as a: motivator, expert, coach, and initiator. In [3], Felder provides a very nice overview of the Kolb's model and several others.
>
|
