|
Using Telescience to Share NASA Resources During the Classroom
Study of a Mars Sample and Return Mission - page 3
Richard Hooper and SV Sreenivasan
Department of Mechanical Engineering
The University of Texas
Austin, Texas 78712 |
Donald A Morrison
Earth Science and Solar System Exploration Division
NASA/Johnson Space Center
Houston, Texas 77058 |
Proceedings of the ASEE Gulf-Southwest Annual Conference, The University of Houston, March 23-25, 1997 |
< Transport
Lag Experiment
The transport lag experiment integrates a traditional lecture with a hands-on demonstration of principles in a single one-hour class. The demonstration uses telescience to bring a remotely-located robot into the classroom. The general procedure is to communicate a scientific or engineering principle with traditional lecture and then to immediately reinforce and illustrate those principles by bringing a complementary experiment directly into the classroom. This general procedure is, or course, not new. The innovation lies in the use of telescience to bring remotely located equipment into the classroom.
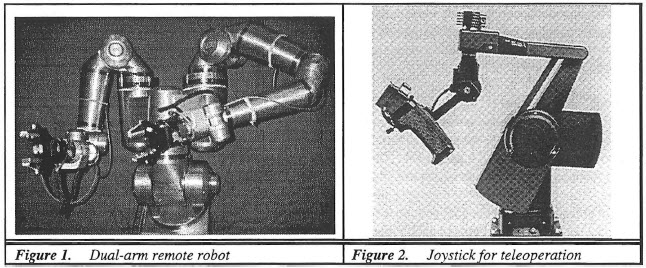
The traditional lecture portion develops the transfer function for a system with transport lag and shows the corresponding deleterious affect on system stability using a root locus diagram. Because of the long distances involved, transport lag (time-delay) is one of the defining problems associated with teleoperation in the NASA environment. Following the lecture, the demonstration gives the students first-hand experience with transport lag as they teleoperate a robot (Figures 1. & 2.) located at a robotics laboratory in another part of the city. From the classroom, the students perform a remote task by using a joystick to send motion commands to the robot. As feedback the students receive live video. The interconnection medium (Internet) introduces a variable time delay that can be significant. This delay between sending the commands and receiving the feedback represents transport lag that the students actually experience as they attempt to control the robot. The students find that when the transport lag is long, it is essentially impossible to perform even relatively simple tasks. This integrated learning experience motivates the students by immediately applying and reinforcing principles presented in class. The telescience techniques allow the students experience with state-of-the-art equipment, which also has a motivational effect.
 |
|
|
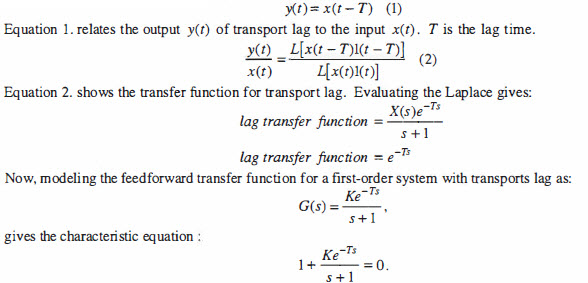
The traditional lecture portion of this experiment functions primarily as an expert presenting information to the students in an organized logical fashion. The lecture develops the well-known controlling equations for a first-order system with transport lag. The following discussion illustrates the most important points. Please see Ogata [5] for more detail:
|
|
Constructing the root-locus diagram for this system shows that
roots will enter the right-half plane for larger values of K. Thus,
transport lag can cause instability even in first-order systems.
Telepresentation
by NASA
The tele-presentation will cover solar system geology and its study. The presentation should be quite interesting as the JSC scientists have extensive experience with planetary geology. They are the curators of the lunar rocks and have been for thirty years. These scientists are also curators of the meteorite recently said to contain artifacts of past Martian life. A JSC geologist is one of the scientists that made this discovery. The presentation will include techniques for analyzing and storing the samples, what the geologists expect to find in the Martian rocks, and what the geologists have found in other extra-terrestrial rocks.
Whether or not it is efficient to have this as a remote tele-presentation or as a "live" presentation is an interesting question. JSC is approximately two-hundred miles from UT. Including driving time it would take the JSC scientist one full-day to give the presentation in-person and the out-of-pocket expenses would be about one-hundred dollars. Giving the presentation remotely would require time to arrange the telecommunications facilities, travel to-and-from the facilities, and set-up at the facilities. This will approach one full-day's worth of time. Thus the time savings would not be significant. Furthermore, two-way, real-time audio and video for a one-hour presentation will cost approximately three-hundred dollars. Thus, giving a live presentation would probably cost less money (assuming there aren't too many traffic citations incurred during the drive). The opportunity for in-person meetings is another aspect that would tend to favor a live presentation as opposed to a remote one.
Email
with Expert
The final course component is entitled simply "email with expert." The primary purpose of this component is to provide the students with a low-cost and comfortable medium for asking questions and interacting with the NASA personnel. Though this component of the course has the capacity to overwhelm the JSC scientists with a deluge of student email, no controls on who may send email and how often currently exist. This is in the hopes of encouraging the students to use the mode of interaction with the JSC scientists. If the volume of email the JSC scientists receive becomes a problem, this component of the course will have to impose some controls. Perhaps each project team will elect a designated email contact.
Conclusions
This paper describes a robot dynamics course that integrates study of a Mars sample-and-return mission as a way to excite and motivate the students. For the sample-and-return application, the paper develops telescience techniques that can bring remotely-located equipment and expertise into the classroom. The work developed four distinct course components associated with the sample-and-return application - though these components would apply in general to many applications found in government and industry. Realistically, these interactions take time away from more traditional methods of educating engineering students. To better understand these trade-offs, this paper examines how the application-based course components compare to traditional lecture, homework, and examinations.
Table l. is the focal point for the comparison. The table classifies seven different course components according to their function as either motivator, expert, coach, or initiator. The course components include the four associated with the sample-and-return application and the more traditional lecture, homework, and examination. This classification illuminated a number of important observations. The first of these is that the three traditional components can function in all four roles. The second observation is that only homework and examinations will function in the role of coach. Essentially, the students will only be able to solve robot dynamics problems if they practice solving robot dynamics problems. This shows that an instructor should exercise caution when diverting time away from homework and examinations.
References
|