|
Geometric
Criteria
<
The Jacobian matrix forms the basis for the geometric performance criteria. Table 2. lists some of the geometric performance criteria. These criteria are task independent and based only on the geometry of the system, thus these criteria are formulated once for each system with no need for reformulation if the task changes (Cleary and
Tesar,
1990).

Manipulator dexterity is the ability of the hand to move accurately and arbitrarily. Taken at the velocity level, a measure of this concept may be provided by the condition number of the manipulator Jacobian. The condition number is a numerical analysis tool which indicates the stability of a given transformation. Employed in this situation, the condition of the manipulator Jacobian indicates how error-prone the joint velocity vector (computed from the end-effector velocity through the inverse) will be. Perfect condition implies that any motion, regardless of direction, will be relatively free from numerical error. The formulation of this criterion follows from the singular value decomposition of the manipulator Jacobian as shown above and is the ratio of
its minimum and maximum singular values.
Inertial
Criteria
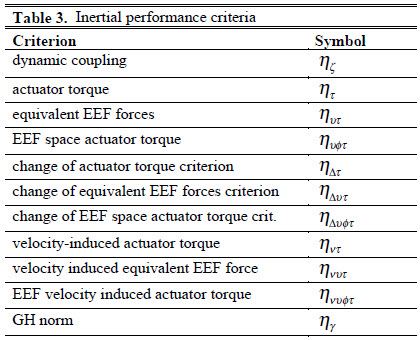
Table 3. lists some of the inertial performance criteria. These criteria have their basis in dynamic models of forces and torques within the system and are essential to the intelligent design and application of fault-tolerant systems. The first four criteria deal with actuator torques. The next three criteria deal with the rate of change of torques. The rate of change of the actuator criterion measures how fast the system can respond to torque and force demands. It is an especially important criterion because larger actuators or higher gear ratios can supply more torque, but both will slow the overall response of the system to external disturbances. Consideration of the basic torque demands as well as its rate of change allows the intelligent allocation of torque resources for enhanced
operation.
Compliance
Criteria
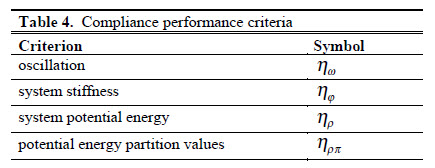
Table 4. lists the compliance performance criteria. The compliance criteria describe the system’s ability to perform precision operations under load. They also correspond to the vibratory modes of the system. The compliance or stiffness of the manipulator is a chief concern in many tasks. When deflections are undesirable, the system stiffness criterion may be
increased.
The arbitrary stiffness of the manipulator’s configuration may be determined via the operator 2-norm of the stiffness matrix, which is its maximum eigenvalue, or the Frobenius (Euclidean) matrix norm, which is the square-root of the sum of the squares of all of the eigenvalues of [K]. A task-dependent criterion may also be defined in a manner similar to that of the force transmission as the structure of the linear equations is the same.
The potential energy partition values, are particularly important compliance criteria. The potential energy partition values measure the distribution of compliance energy and how it changes as the system moves. An unusually high compliance energy content in any part of the system indicates a design problem. Rapid changes in compliance energy indicate large local forces, which correspond to large actuator demands and decreased precision.
Kinetic
Energy Criteria
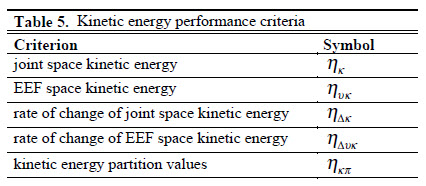
Table 5. lists some of the kinetic energy performance criteria. These criteria address high-level issues represented in relatively simply formulations.The rate of change of the kinetic energy is a notable criterion in this table. Large changes in kinetic energy correspond to very large demands on actuator power. Very rapid changes in the kinetic energy represent shocks to the system.
REFERENCES
Baillieul, J., 1986, “Avoiding Obstacles and Resolving Kinematic Redundancy,”
Proceedings, 1986 IEEE International Conference on Robotics and
Automation, Vol. 3, pp. 1698-1704.
Benedict, C. E., and Tesar, D., 1978, “Model Formulation of Complex Mechanisms With Multiple Inputs,”
Journal of Mechanical Design, Vol. 100, pp. 747-761.
Chladek, J., 1990, ‘‘Fault Tolerance for Space Based Manipulator Mechanisms and Control System,'' First International Symposium on Measurement and Control in Robotics (ISMCR ‘90).
Das, H., Slotine, J-J. E., and Sheridan, T. B., 1988, “Inverse Kinematic Algorithms for Redundant Systems,” Proceedings, 1988 IEEE International Conference on Robotics and
Automation, Vol. 1, pp. 43-48.
Eschenbach, P. W., and Tesar, D., 1969, “Optimization of Four-Bar Linkages Satisfying Four Generalized Coplanar Positions,”
Journal of Engineering for Industry, February, 1969, pp. 75-82.
Hooper, R., and Tesar, D., 1995, “Motion Coordination Based on Multiple Performance Criteria with a Hyper-Redundant Serial Robot Example,”
Proceedings of the 10th IEEE International Symposium on Intelligent
Control.
Liegeois, A., 1977, “Automatic Supervisory Control of the Configuration and Behavior of Multibody Mechanisms,”
IEEE Transactions on Systems, Man, and Cybernetics, Vol. SMC-7, No. 12, pp. 868-871.
Thomas, M., and Tesar, D., 1982, “Dynamic Modeling of Serial Manipulator Arms,”
Journal of Dynamic Systems, Measurement, and Control, Vol. 104, pp. 218-228.
|