|
SOFTWARE
Multi-Criteria
Decision Making
<
This section discusses a method of redundancy resolution that uses local exploration to explicitly identify a set of options corresponding to a response in reaction to a fault. From this set, a decision making algorithm chooses one option for the system. The decision making algorithm can base its choice on any number of performance criteria. Simulated perturbations drive the exploration. Eschenbach and Tesar (1969) developed the sequential filters method of decision making and applied it to the mechanism synthesis problem. They reported an example of the method reducing a design space of 60,000 to one of only 50. The following discussion details the application to redundant, fault-tolerant
systems.
 |
|
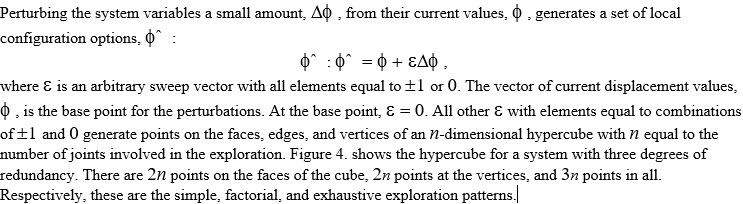
Figure 4. Hypercube for 3 extra
configuration options |
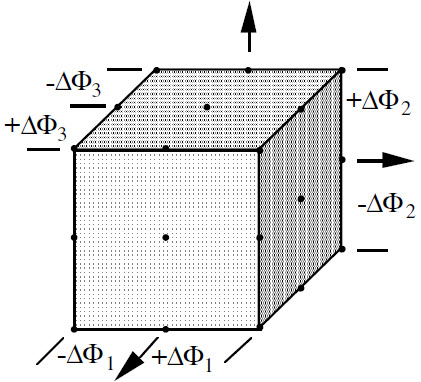
Figure 5. Shows a photograph of a dual-arm robot with 17 independent degrees of freedom. This robot functions as a primary fault tolerance testbed. It’s massive redundancy and inherent complexity make it ideal for this
role.
 |
|
Figure 5. 17 DOF Dual-Arm Robot Manufactured by the Robotics Research Corporation of Cincinnati, Ohio. |
Multiple performance criteria form the basis for configuration management in this work. These criteria emphasize task-based performance indicators derived from the physical description of the manipulator. The origins of these criteria are from foundation activity in high speed mechanisms for production machinery (Benedict and Tesar, 1978). There, the issues of precision and modeling of complex non-linear structures forced the development of a geometric understanding for mechanical structures and how to represent them with efficient analytical tools. Thomas and Tesar (1982) showed that the concept of kinematic influence coefficients (used in systems with 1 DOF) were effective in spatial manipulator structures with N DOF. An important development in this continuing work on performance criteria has been the association of performance criteria with the D&D tools the DAWM will use while performing its tasks. By choosing a tool, the operator will automatically scale and prioritize the criteria. This automatic process allows the use of multiple performance criteria without distracting the operator from the task at hand or consuming valuable time.
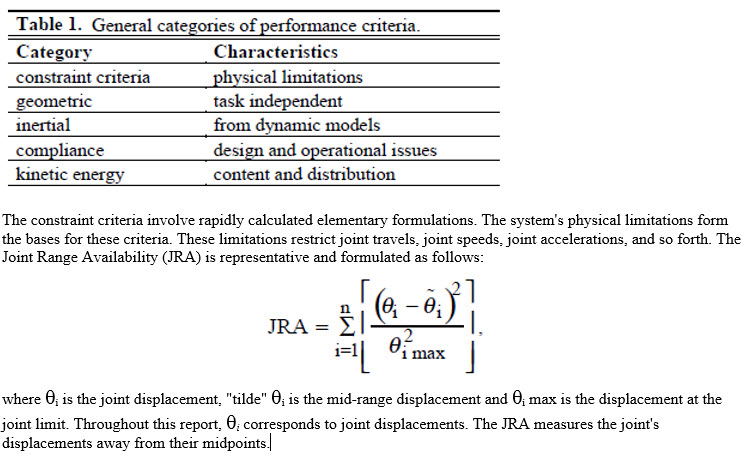
The criteria formulations emphasize efficiency and portability. With currently available computational hardware, decisions based on several of these criteria are possible in real-time. Given the rapid pace of advancements in computational speed, it will soon be possible to employ the entire suite of performance criteria in a real-time decision making process. Table 1. lists the general categories of these performance criteria.
>
|
